# IRS-180 紅外線避障感測器
當模組檢測到前方障礙物信號時,電路板上綠色指示燈點亮電平,同時OUT埠持續輸出低電平信號,該模組檢測距離2~30cm,檢測角度35°,檢測距離可以通過電位器進行調節,順時針調電位器,檢測距離增加;逆時針調電位器,檢測距離減少
# 特性:
感測器主動紅外線反射探測,因此目標的反射率和形狀是探測距離的關鍵。 其中黑色探測距離最小,白色最大;小面積物體距離小,大面積距離大
感測器模組輸出埠OUT可直接與單片機IO口連接即可, 也可以直接驅動一個5V繼電器;連接方式:VCC-VCC;GND-GND;OUT-IO
比較器採用LM393,工作穩定
可採用3-5V直流電源對模組進行供電。當電源接通時,紅色電源指示燈點亮
具有3mm的螺絲孔,便於固定、安裝
電路板尺寸:3.2cmx 1.4cm
每個模組在發貨已經將閾值比較電壓通過電位器調節好,
非特殊情況,請勿隨意調節電位器模組介面說明:
•VCC 外接3.3V-5V電壓(可以直接與5v單片機和3.3v單片機相連)
GND 外接GND
OUT 小板數位量輸出介面(0和1) 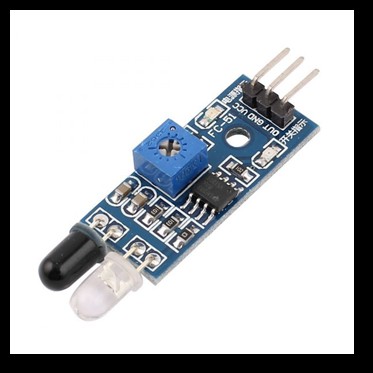
程式範例:
//IRS -180
int IR_Objects = 3; //紅外線接
int IR = 0; //紅外線初始值
void setup() {
Serial.begin(9600);
pinMode(IR_Objects,INPUT); //定義紅外線為輸入端
}
void loop() {
IR=digitalRead(IR_Objects); // 定義IR_Objects=IR 並為讀取紅外線狀態
if(IR == LOW) //假設紅外線等於高電平
{
Serial.println("yes");
delay(IR); // 延遲時間等於IR作動時間
}
else
{
Serial.println("no");
}
}
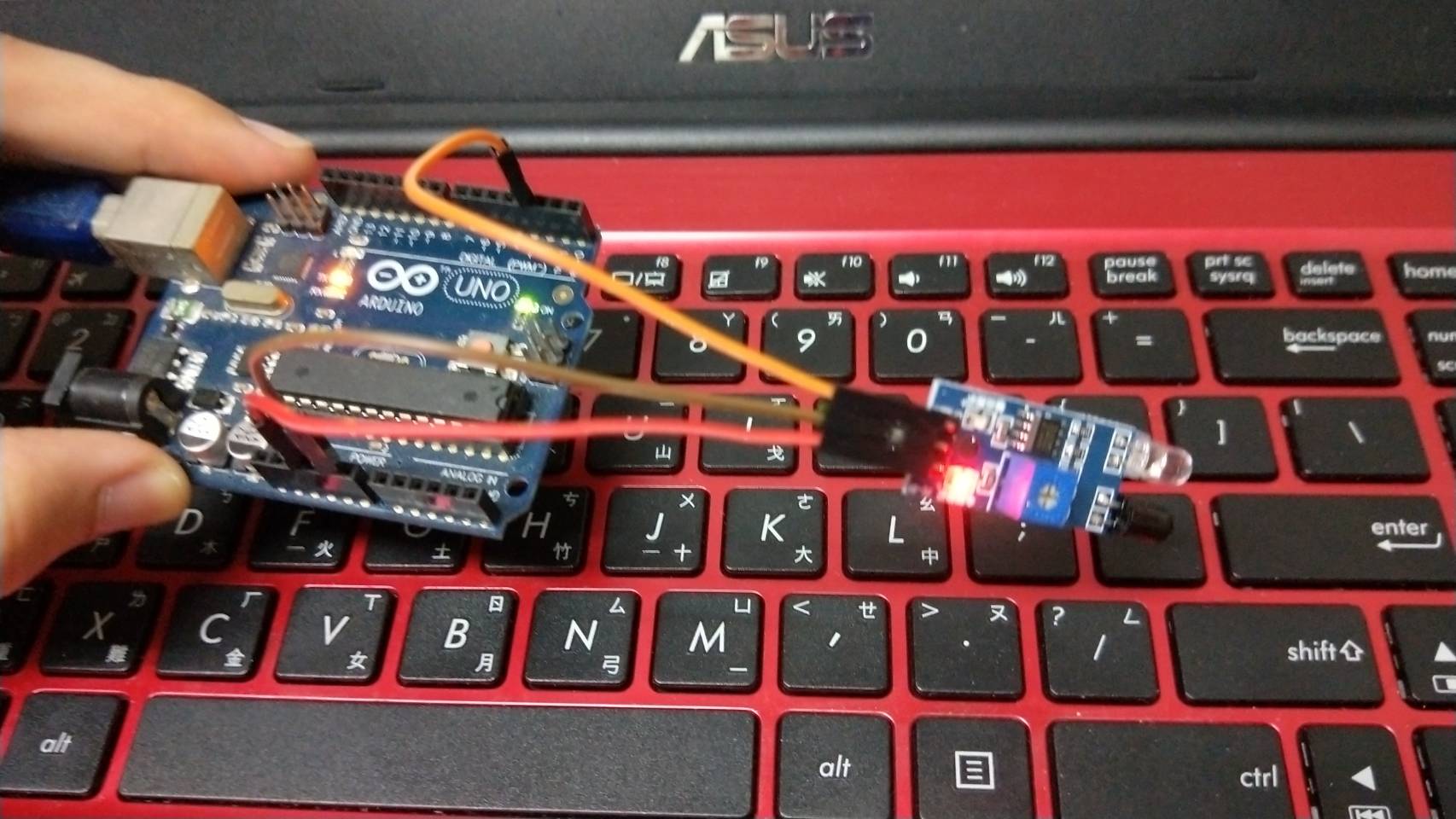
結果:
電路(接線)